|
|||||||||
 |
 |
 |
 |
 |
 |
 |
|||
-------------------------------------------- Tony Threatt Paul Yanik P I s : --------------------------------------------
Stan Healy i n t e r n a t ' l m e m b e r s : -------------------------------------------
|
|
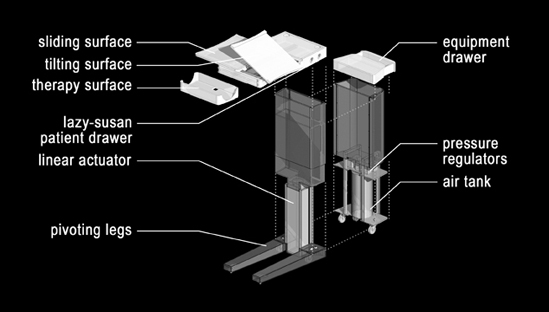
video of ART's 2D pneumatic robot surface o v e r v i e w : In hospitals, technology has become pervasive and indispensable during medical crises. At home, technology proliferates as computerized health monitoring systems and, perhaps in the future, as assistive "humanoid" robots. Meanwhile, our everyday environments remain essentially conventional: low-tech and ill-adaptive to dramatic life changes. This social condition places strain on healthcare and family support systems, and represents a failure of scientists, engineers and architects to support independent living. The key deliverable of the SHB award is the full-scale, working ART prototype. Our trans-disciplinary team has developed this complex, physical-digital artifact by way of iterative design and evaluation activities that recognize engineering, architectural design and human-centered design as inseparable. Key outcomes of the research are the "continuum robotic" surface as well as an innovative approach to human mobility and its metrics for intelligent, physical artifacts. The key broader impact of the research is ART, empowering people to remain in their homes for as long as possible, even as their physical capabilities alter over time; and, in more grave circumstances, affording people some semblance of feeling "at home" as users and ART move to assisted care facilities.
s u m m a t i v e p u b l i c a t i o n s: Threatt, A.L., Merino, J.N., Brooks, J.O., Healy, S., Manganelli, J., Walker, I.D., Green, K.E. The design, prototyping, and formative evaluation of an Assistive Robotic Table (ART) for stroke patients. HERD (Health Environments Research & Design Journal). 2017 Apr;10(3):152-169. doi: 10.1177/1937586716687802. Epub 2017 Feb 19. PMID: 28335630. p u b l i c a t i o n s : Merino, J., Threatt, A. L., Walker, I.D. and Green, K.E. Forward Kinematic Model for Continuum Robotic Surfaces. In Proceedings of IROS 2012: the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, October 2012, pp. 3453–3460. Yanik, P., Manganelli, J., Merino, Threatt, T., Brooks, J. O., Green, K. E. and Walker, I. D. A Gesture Learning Interface for Assistive Robotics Employing a Growing Neural Gas Approach. The IUI 2013 Workshop on Interactive Machine Learning of the ACM Conference on Intelligent User Interfaces, March 19-22, Santa Monica, California, pp. 283-290. Threatt, A. L., Merino, J., Green, K.E., Walker, I.D., Brooks, J. O. et. al. A Vision of the Yanik, P., Manganelli, J., Merino, Threatt, T., Brooks, J. O., Green, K. E. and Walker, I. D. Use of Kinect Depth Data and Growing Neural Gas for Gesture Based Robot Control. Proceedings of PervaSense2012, the 4th International Workshop for Situation Recognition and Medical Data Analysis in Pervasive Health Environments. San Diego, California, May 21, 2012. pp. 283-290. Green, K.E., Walker, I.D., Brook, J. O. and Logan, W.C. Jr. comforTABLE: A Robotic Environment for Aging in Place, late-breaking paper, HRI’09, March 11–13, 2009, La Jolla, California, USA., pp. 223-224. Brooks, J., Walker, I.D., Green, K.E., Manganelli, J., Merino, J., Smolentzov, L.., Threatt, T., Yanik, P.M., Ficht, S., Kriener, R., Mossey, M., Mutlu, A., Salvi, D., Schafer, G., Srikanth, P., and Xu, P. (2012). “Robotic Alternatives for Bedside Environments in Healthcare”, International Journal of Systems Engineering, Applications, and Brooks, J.O., Smolentzov, L., Mossey, M., Carroll, C., Kendrick, K., Sprogis, K., Manganelli, J., Healy, S.L., Walker, I., & Green, K. (2012). Group differences in preferences for a novel nightstand. Health Environments Research & Design. 5(4), 88-97. Brooks, J., Walker, I.D., Green, K.E., Manganelli, J., Merino, J., Smolentzov, L.., Threatt, T., Yanik, P.M. “Robot Bedside Environments for Healthcare”, Proc. 11th WSEAS International Conference on Signal Processing, Robotics, and Automation, Cambridge, UK, February 2012, pp. 32-37. Green, K.E., Walker, I.D., Brooks, J.O., Threatt, T. and Merino, J. An Assistive Robotic Table (ART) Promoting Independent Living. Workshop on New and Emerging Technologies in Assistive Robotics, IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, September 2011. I.D. Walker, J.O. Brooks, K.E. Green, J. Manganelli, L. Smolentzov, T. Threatt, P.M. Yanik, and J. Merino, Interactive Robot Environments in Healthcare. Workshop on Interactive Systems in Healthcare (WISH 2011), Washington, D.C., October 2011. Buckley, M.V., Ellison, M.E., Threatt, T., Merino, J., Green, K.E. and Walker, I.D. The Challenges of Material Selection for Compliant Robotic Surfaces. Proc. Fiber Society Fall Conference, Charleston, SC, October 2011. A.L. Threatt, J. Manganelli, K.E. Green, J. Merino, and I.D. Walker, “An Adaptive, Social Robotic Environment for Healthcare”, CHI 2012, Austin, TX, May 2012. Yanik, P., Manganelli, J., Merino, Threatt, T., Brooks, J. O., Green, K. E. and Walker, I. D. A Gesture Learning Interface for Assistive Robotics Employing a Growing Neural Gas Approach. The IUI 2013 Workshop on Interactive Machine Learning of the ACM Conference on Intelligent User Interfaces, March 19-22, Santa Monica, California, pp. 283-290. |
|
||||||
 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|